


| Terminology | |
|---|---|
| FLA Vs FLC: |
Lorem ipsum dolor sit amet consectetur adipisicing elit. Tenetur praesentium impedit similique quos! Dolore quis eaque facere! Ducimus vero officia quis consequuntur doloremque nihil, suscipit, accusamus beatae, assumenda aliquid exercitationem?
Continue reading
Lorem ipsum dolor sit amet consectetur adipisicing elit. Tenetur praesentium impedit similique quos! Dolore quis eaque facere! Ducimus vero officia quis consequuntur doloremque nihil, suscipit, accusamus beatae, assumenda aliquid exercitationem? |
| LRC: |
Locked Rotor Current
Continue reading
Lorem ipsum dolor sit amet consectetur adipisicing elit. Tenetur praesentium impedit similique quos! Dolore quis eaque facere! Ducimus vero officia quis consequuntur doloremque nihil, suscipit, accusamus beatae, assumenda aliquid exercitationem? |
| Motor Inrush Current |
6-10x FLA
Continue reading
When an AC induction motor is started, the supplied voltage creates a magnetic field in the stator, which induces a magnetic field in the rotor. The interaction of these two magnetic fields produces torque and causes the motor to turn. |
| Motor Nameplate Data | |
|---|---|
| |
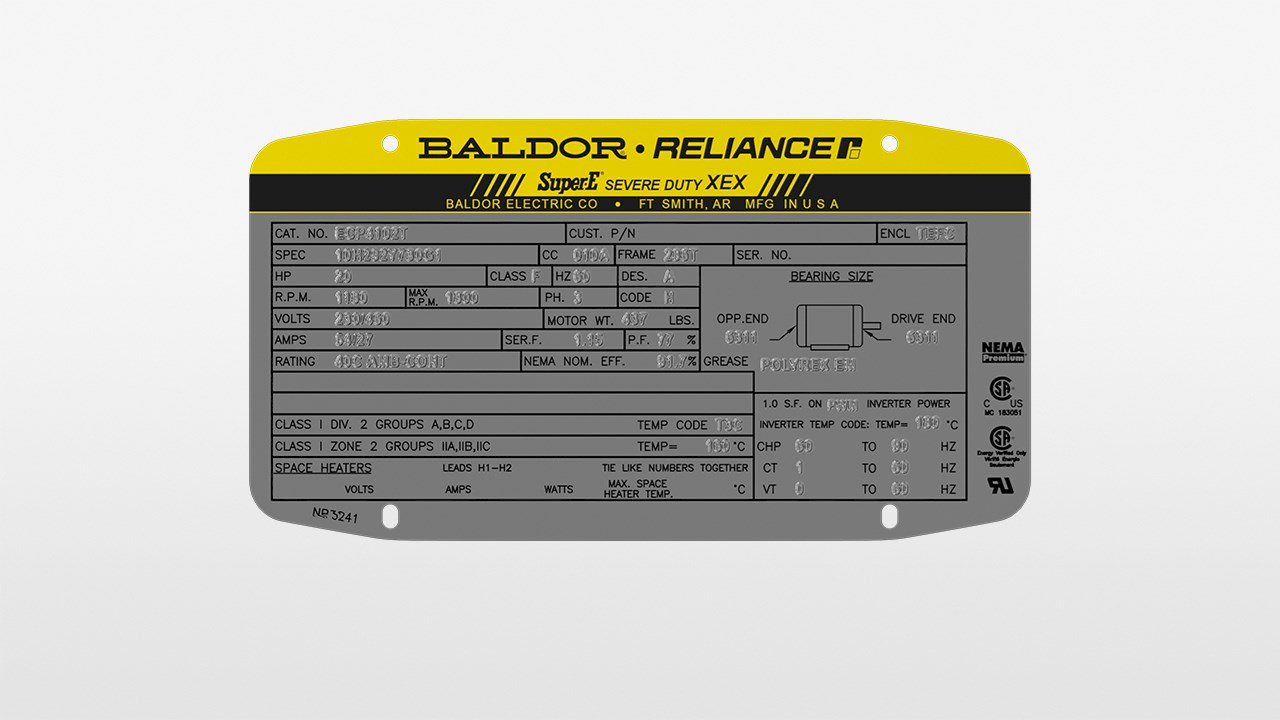
Full Load Amp Rating:
The FLA rating is the rate at which a motor will consume power at 100% of rated load and at rated and balanced voltage. This number is extremely important, especially when dealing with electrical components. The wiring, starter, circuit breaker, and thermal overloads are all sized based upon the full load amp rating. When it comes to sizing a VFD the FLA rating is a very important piece of information. Learn more about sizing VFDs at our VFD Buying Guide.
Work
distance in feet x force in pounds, both applied in the same direction.
Power
time rate of doing work (work/time). Some units of measuring power are watts, kilowatts, HP, etc.
Horse Power
is defined as doing work at the rate of 33,000 ft x lbs/minute. A horse can do work at this rate continuously without being overloaded. A human cannot sustain doing work at the rate of 1 HP for very long. There is an interesting video of an Olympic cyclist on a stationary bike generating enough power to operate a toaster at ~700+ watts (746 watts = 1 HP).
Standard KVA Ratings:
- Work
- Power
distance in feet x force in pounds, both applied in the same direction.
time rate of doing work (work/time). Some units of measuring power are watts, kilowatts, HP, etc.
Service Factor
Motors are often designed to handle a temporary increase in demand. Service factor represents the motor’s ability to handle these temporary demand increases. Think of service factor as an insurance policy. It is designed for ambient temperatures, altitude, high and low line voltages, and imbalanced voltages. It should not be used as a method of increasing motor horsepower. The service factor is expressed as a decimal. If you do not see a service factor rating on the motor nameplate the service factor is typically 1.00. Additionally, all motors running on a VFD (even at 60 HZ) will lose service factor and be rated at 1.00. Please consult your manual for more information. You can dramatically reduce the life of your motor by consistently running into the service factor rating.
Efficiency
A motor’s efficiency rating measures how well the motor converts electrical energy (input) into mechanical energy (output). This is usually displayed as a decimal. A motor’s energy consumption is by far its largest operating expense. As a general rule, a motor that runs 24/7/365 for one year could cost three times more than the purchase price in power consumption. In many applications a VFD can provide considerable savings with regards to operational costs. Centrifugal pumps often have great potential for energy savings. Under some circumstances using a VFD to reduce speed by 20% can result in energy savings of 50%. However, energy savings will vary based upon several factors, such as motor conditions, application, and energy costs in your area.
Frame Size:
Frame size data on the nameplate is an important piece of information. It determines mounting dimensions such as the and the. The frame size is often a part of the type designation which can be difficult to interpret because special shaft or mounting configurations are used NEMA frame size outlines motor footprint and shaft dimensions. The first two numbers represent the shaft height from the mounting base. This number divided by four represents the shaft height in inches. The third number is the bolt mounting hole dimensions, some motors may have multiple holes for different mounting options.
The enclosure of the must protect the windings, bearings, and other mechanical parts from moisture, chemicals, mechanical damage and abrasion from grit. NEMA standards MG1-1.25 through 1.27 define more than 20 types of enclosures under the categories of open machines, totally enclosed machines, and machines with encapsulated or sealed windings.
https://electrical-engineering-portal.com/7-most-common-motor-enclosure-types-defined-by-nema-standards
- Opwn Drip Proof
- Totally enclosed Fan Cooled (TEFC)
- Totally enclosed Non- Ventilated (TENV)
Allows air to circulate through the , but prevent drops of liquid from falling into motor within a 15 degree angle from vertical. Typically used for .
The enclosure of the must protect the windings, bearings, and other mechanical parts from moisture, chemicals, mechanical damage and abrasion from grit. NEMA standards MG1-1.25 through 1.27 define more than 20 types of enclosures under the categories of open machines, totally enclosed machines, and machines with encapsulated or sealed windings. Allows air to circulate through the , but prevent drops of liquid from falling into motor within a 15 degree angle from vertical. Typically used for . Prevents the free exchange of air between the inside and outside of the frame, but does not make the frame completely air tight. A fan is attached to the shaft and pushes air over the frame during its operation to help in the cooling process.
The Ribbed frame is the designed to increase areafor cooling purposes.
TEFC style enclosure is the most versatiled of all. It is the pumps, fans, compressors, general industrial belt drive and directed connected equipment.
The enclosure of the must protect the windings, bearings, and other mechanical parts from moisture, chemicals, mechanical damage and abrasion from grit. NEMA standards MG1-1.25 through 1.27 define more than 20 types of enclosures under the categories of open machines, totally enclosed machines, and machines with encapsulated or sealed windings. Allows air to circulate through the , but prevent drops of liquid from falling into motor within a 15 degree angle from vertical. Typically used for . Prevents the free exchange of air between the inside and outside of the frame, but does not make the frame completely air tight. A fan is attached to the shaft and pushes air over the frame during its operation to help in the cooling process. It is used on pumps, fans, compressors, and direct connected equipment. Similar to a TEFC, and relies on convention for cooling. No vent openings, tightly enclosed to prevent the free exchange of air, but not airtight
These are suitable for uses which are exposed to dirt or dampness, nbut not very moist hazurdous (explosive) locations
The letter is the type of frame, each type is provided below: Fractional type motors (frame size 48 and 56) C Face mounting (can be round body or footed) G Gasoline pump motor H Indicates a frame with a larger “F” dimension J Jet pump motor Y Special mounting dimensions Z All mounting dimensions are standard except shaft extension and or design Integral type motors (frame size 143 to 449)
A DC motor or generator C Face mounting (can be round body or footed) D Flange mounting (can be round body or footed) P Vertical hollow and solid shaft with P-base flange HP Vertical solid shaft with P-base flange, normal thrust JM Closed coupled pump motor with C-face mounting and special shaft extensions JP Closed coupled pump motor with C-face mounting and special long shaft extensions LP Vertical sold shaft with P- base flange, medium thrust S Standard short shaft T Standardized shaft (1964 and newer) U Standardized shaft (1964 and older) V Vertical mounting Y Special mounting dimensions Z All mounting dimension are standard except shaft extension
Nema Motor Insulation Classes:
NEMA motor insulation classes describes the ability of motor insulation in the windings to handle heat. There are four insulation classes in use namely: A, B, F, and H. All four classes identify the allowable temperature rise from an ambient temperature of 40° C (104° F). Classes B and F are the most common in many applications.
Temperature rises in the motor windings as soon as the AC motor is started. As shown in the table below, the combination of ambient temperature and allowed temperature rise equals the maximum rated winding temperature. Allowable temperature rise is made up of the maximum temperature rise for each insulation class plus a hot-spot over-temperature allowance. If the motor is operated at a higher winding temperature, service life will be reduced. As a rule, a 10° C increase in the operating temperature above the allowed maximum can cut the motor’s insulation life expectancy in half. The table below shows the different insulation classes as defined by NEMA:
Nema Motor Insulation Classe Table
| Classes | Maximum Ambient Temperature (°C) |
Maximum Temperature Rise (°C) |
Hot-spot Over Temperature (°C) |
Maximum Winding Temperature (Tmax)(°C) |
|---|---|---|---|---|
| A | 40 | 60 | 5 | 105 |
| B | 40 | 80 | 10 | 130 |
| F | 40 | 105 | 10 | 155 |
| H | 40 | 125 | 15 | 180 |
Bearings:
Bearings are the component in an AC motor . The information is usually given for both the and the bearing opposite the drive-end, .
Bearings:
Bearings are the component in an AC motor . The information is usually given for both the and the bearing opposite the drive-end, .
| NETA Test Procedure | |
|---|---|
NETA ATS / MTS7.16.1.1 Motor Control, Motor Starters, Low-VoltageNETA ATS / MTS7.16.2.2 Motor Control, Motor Control Centers, Medium-VoltageTABLESNETA ATS /MTSNETA ATS7.16.1.1 Motor Control, Motor Starters, Low-VoltageA. Visual and Mechanical Inspection:
B. Electrical Tests:
C. Test Values – Visual and Mechanical
D. Test Values – Electrical
NETA MTS7.16.1.1 Motor Control, Motor Starters, Low-VoltageA. Visual and Mechanical Inspection:
B. Electrical Tests:
C. Test Values – Visual and Mechanical
D. Test Values – Electrical
NETA ATS7.16.2.1 Motor Control, Motor Control Centers, Low-Voltage
NETA MTS7.16.2.1 Motor Control, Motor Control Centers, Low-Voltage
|
|
| Motor Protection | |||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
NEC Requirments
The NEC or CEC requires that motor branch circuits be protected against overloads and short circuits. Overload protection may be provided by fuses, overload relays or motor thermal protectors. Short circuit pro
Overload Protection
The NEC or CEC allows fuses to be used as the sole means of overload protection for motor branch circuits. This approach is often practical with small single phase motors. If the fuse is the sole means of protection, the fuse ampere rating must not exceed the values shown in Table 1. Most integral horsepower 3 phase motors are controlled by a motor starter which includes an overload relay. Since the overload relay provides overload protection for the motor branch circuit, the fuses may be sized for short circuit protection.
Short Circuit Protection
The motor branch circuit fuses may be sized as large as shown in Table 2 when an overload relay or motor thermal protector is included in the branch circuit. Time delay fuse ratings may be increased to 225% and non-time delay fuse ratings to 400% (300% if over 600 amperes) if the ratings shown in Table 2 will not carry motor starting current. Some manufacturers’ motor starters may not be adequately protected by the maximum fuse sizing shown in Table 2. If this is the case, the starter manufacturer is required by UL 508 to label the starter with a maximum permissible fuse size. If so labeled, this maximum value is not to be exceeded. Where the percentages shown in Table 2 do not correspond to standard fuse ratings the next larger fuse rating may be used. Standard fuse ratings in amperes: 15 20 25 30 35 40 45 50 60 70 80 90 100 110 125 150 175 200 225 250 300 350 400 450 500 600 700 800 1000 1200 1600 2000 2500 3000 4000 5000 6000 Fuse Protection & Sizing
The overload protection is sized per the motor nameplate current rating, not the motor full load current (FLC) rating. Thus, 60A×1.25=75A. Overload protection shall not exceed 75A, so you need to use a 70A dual-element fuse [240.6(A) and 430.32(A)(1)]. Motors that don't have a service factor rating of 1.15 or higher or a temperature rise rating of 40°C and less must have an overload protection device sized at not more than 115% of the motor nameplate ampere rating (430.37).
Estimate of Normalized Incident Energy\( D_{B} = 610 \cdot \begin{bmatrix} 4.184 \cdot \color{blue} {C_{f}} \cdot \color{green} {E_{n}}\cdot \left(\begin{array}{c}\frac{t}{0.2} \end{array}\right) \left(\begin{array}{c}\frac{1}{E_{b}} \end{array}\right) \end{bmatrix}^{\frac{1}{x}} \)
Can Transformers be Operated at Voltages other than Nameplate VoltagesNEMA motor insulation classes describes the ability of motor insulation in the windings to handle heat. There are four insulation classes in use namely: A, B, F, and H. All four classes identify the allowable temperature rise from an ambient temperature of 40° C (104° F). Classes B and F are the most common in many applications. 430.22 Single MotorThe distance at which a person without personal Conductors that supply a sing le motor used in a continuous duty application shall have an ampacity of not less than 125 percent of the motor full-load current rating, as determined by 430.6(A)(1), or not less than specified in 430.22(A) through (G). 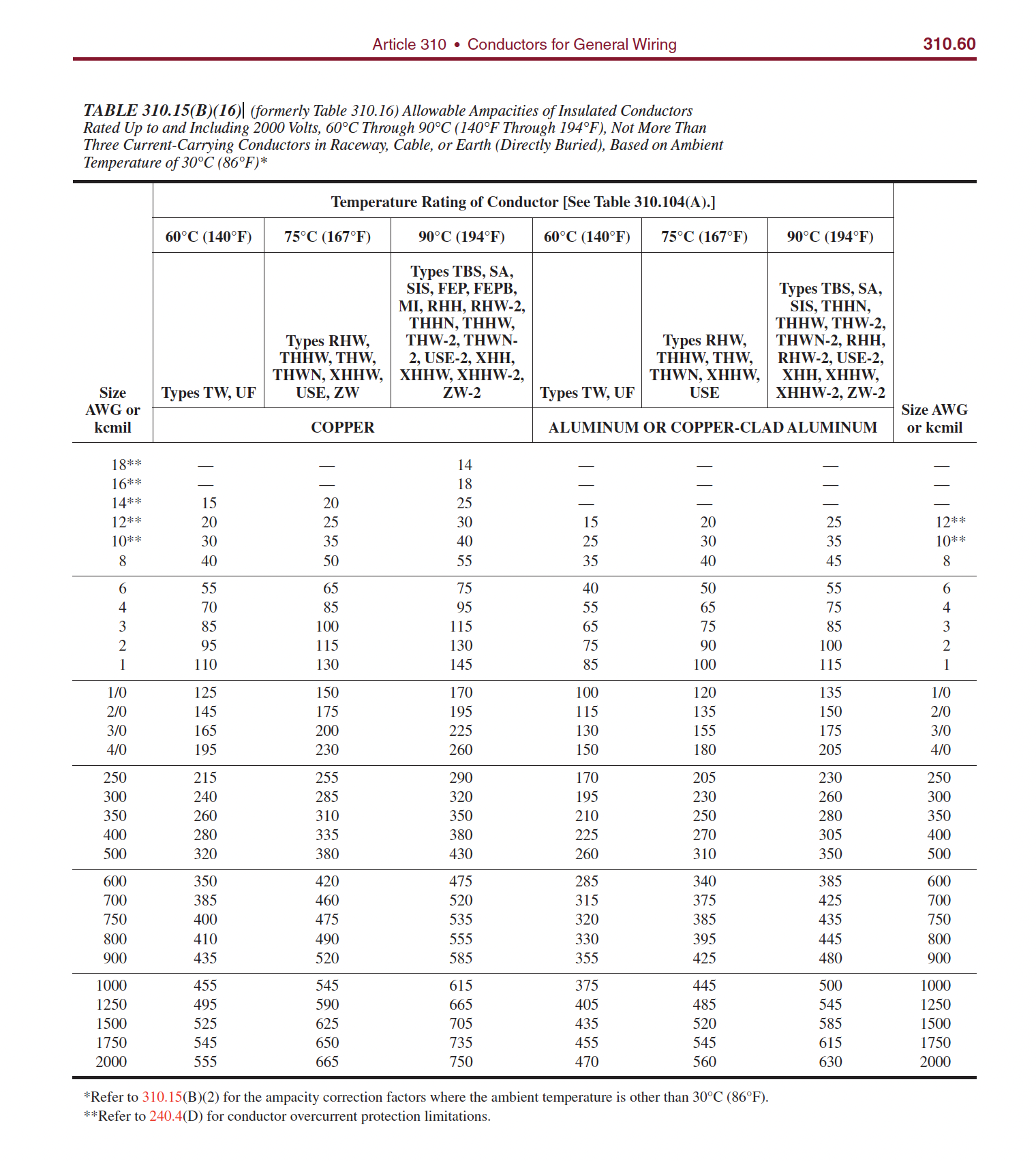
Ampere RatingThe selection of fuse ampere rating is a matter of experience and personal preference. Some prefer to size time delay fuses at 125% of motor full load amperes. This sizing will provide a degree of overload protection for motors with a service factor of 1.15. Sizing fuses at 125% of motor nameplate amperes in some applications may result in nuisance fuse openings. Time delay fuses sized at 125% may open at motor locked rotor current before some NEMA Class 20 overload relays operate. Nuisance fuse openings may result if Class RK1 or Class J fuses are sized at 125% of motor full load current. These fuses are more current limiting than the RK5 and have less short time current carrying capability Ampere RatingThe selection of fuse ampere rating is a matter of experience and personal preference. Some prefer to size time delay fuses at 125% of motor full load amperes. This sizing will provide a degree of overload protection for motors with a service factor of 1.15. Sizing fuses at 125% of motor nameplate amperes in some applications may result in nuisance fuse openings. Time delay fuses sized at 125% may open at motor locked rotor current before some NEMA Class 20 overload relays operate. Nuisance fuse openings may result if Class RK1 or Class J fuses are sized at 125% of motor full load current. These fuses are more current limiting than the RK5 and have less short time current carrying capability Time VS. Non-Time Delay FusesTime delay fuses are the most useful fuses for motor branch circuit application. A time delay fuse can be sized closer to motor full load current, providing a degree of overload protection, better short circuit protection, and possible use of a smaller disconnect switch. | |||||||||||||||||||||||||||||||||||||||
| Motor Inrush Current | |
|---|---|
|
When an AC induction motor is started, the supplied voltage creates a magnetic field in the stator, which induces a magnetic field in the rotor. The interaction of these two magnetic fields produces torque and causes the motor to turn. |
|
| Motor Contribution, short circuit condition |
Motor's contribution is the current generated by a motor or motors during a short circuit condition. It represents a small but important value that is needed to determine the maximum short circuit current available and thereby establishing the short circuit rating of electrical equipment. Regardless of the size or voltage rating of a motor, it can be demonstrated that motor contribution is present during a fault. During normal operation a motor converts electrical energy into mechanical energy. Current flowing in the stator produces a rotating magnetic field with the poles facing toward the rotor. This rotating magnetic field induces a current into the rotor. A magnetic field with the poles facing out is produced in the rotor due to the stator induced current. This causes the rotor (motor shaft) to rotate. As long as the stator is supplied to a stable voltage supply, the motor shaft will continue to rotate. |
|
|---|---|---|
| Motor Terminology | |
|---|---|
| PROTECTION COORDINATION: |
An electric arc or an arcing fault is the flow of electric current through the air from one conductor to another or to ground. Arcs are generally initiated by a flashover caused by some type of conductor that subsequently vaporizes or falls away, leaving an arc. Arcing faults create many hazards, but the greatest risk is burn injuries due to exposure to the heat generated by the arc. This heat can cause serious, even fatal burns, as well as ignite clothing and other nearby material and objects. In addition, electric arcs can produce molten metal droplets, UV radiation, and explosive air pressure waves. |